在Rope中测量"可达"
观测你的猫的生死可不是件易事。当太阳明晃晃地照在可爱的Mudy身上时,它身上蓬松的毛反射了光线。光线经过许多介质进入你的眼中。哪怕不研究我们的身体如何处理这些莫名奇妙的光线,光从皮毛到你眼前的过程也需要时间。只不过这个时间太短:当你(在真空中)距离Mudy 299792458米时,这个时间是1秒。换句话说,当你在南极时,你看到北极的Mudy至少是0.05秒前的Mudy;当你在中国时,你看到北美的Mudy至少是0.1秒前的Mudy。
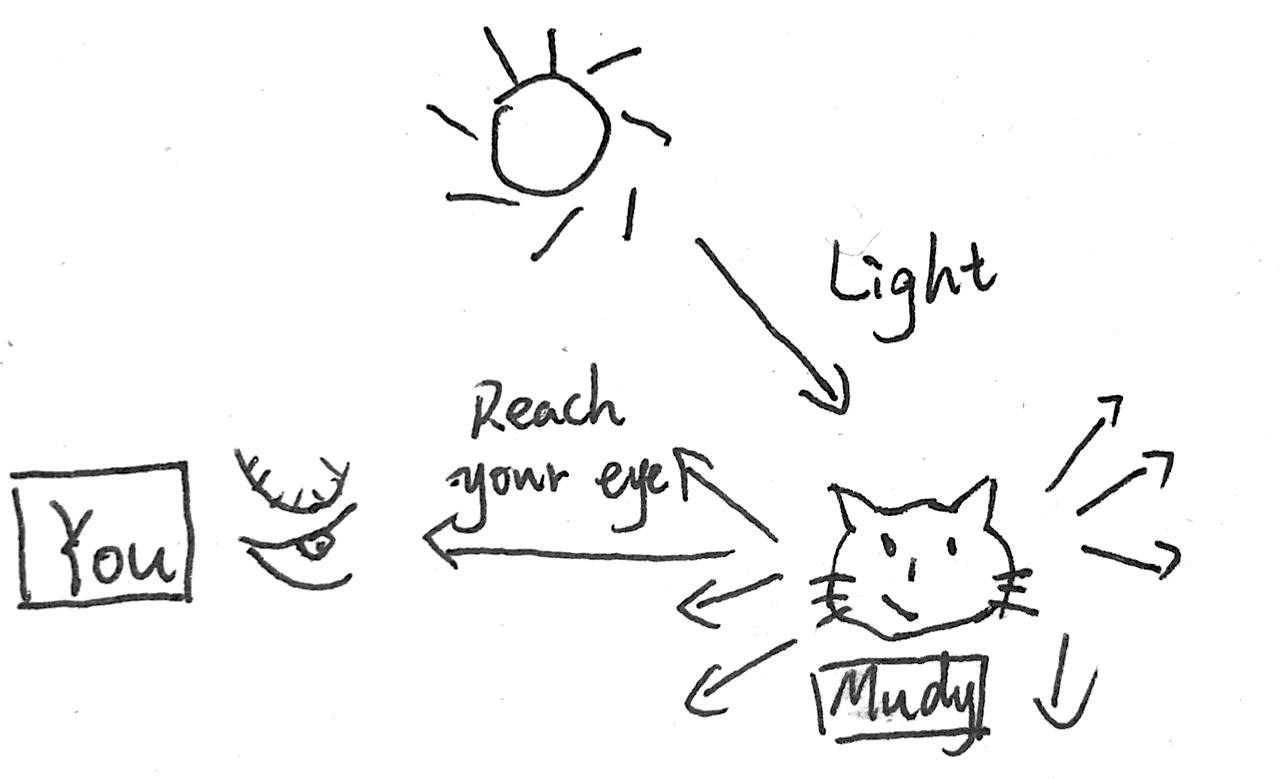
Rope是为分布式应用框架Kache设计的抽象网络层。作为一个分布式应用框架,网络是最必要也是最麻烦的事情。在分布式网络里,知道一个Peer是否活着和能否连接上是重中之重。但是,在网络上观测一个Peer就如观测北极的Mudy或数千光年外的恒星一样麻烦。因为:1)你的朋友总是很麻烦,哪怕他们本意并不是想给你捣乱;2)你没办法不花时间就知道他们的情况,哪怕你和他们的延时只有1ms,你知道的也只是他们1ms前的情况,更别说我们不可能持续去监控他们的状况。
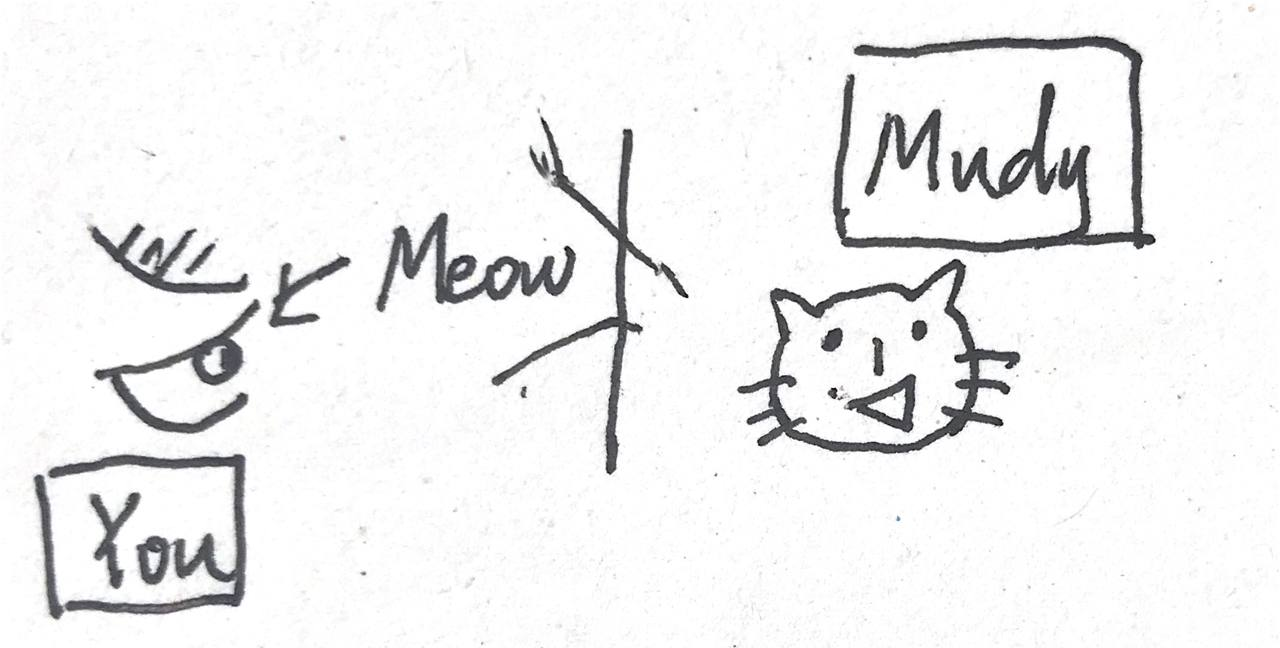
在描述一个Peer是否“可达”时,我们会变得混乱:我们事实上有无限多种方法“达”一个Peer。就像我们可以不用“看”就可以“听”到Mudy还活着。
尽管我们有很多方法跟一个Peer交换信息,但却不是所有方法在所有时刻都有效。所以在描述一个Peer是否“可达”时,我们还需要描述其中一个方法是否“可达”目的地。
Rope使用PhysicalAddress和Peer分别描述路径和Peer的“可达”性。对于Peer而言,我们只需要知道它是否“活着”,即我们能否在网络上找到它。但对于PhysicalAddress而言,除了我们能否找到它,我们还需要知道我们是否能通过这条路径连接到Peer。
Peer
Peer,在中文中经常被翻译成“对等端”,我们对它的唯一要求就是活着。
1 | pub const Peer = struct { |
这里我们采用了一种租期风格的方法来测量Peer是否活着:Peer会通过“租期”承诺自己在多少时间前会活着,Peer在租期过期前需要不停地续期,过期后我们就认为Peer已经死了。aliveUntil是这个租期的最后期限,aliveOffest则是Peer设置的租期时长。租期虽然被广泛使用(大部分的协议的心跳算法也使用租期),但它是一个很令人头疼的算法。
租期不定
租期的令人头疼之处在于:租期时长可以是一个随意的值,但算法的表现跟租期时长有关,我们需要根据情况确定租期的值。较长的租期会使得Peer被错认为能连接上的时间会更长,它使得我们要测量的可达性变为“可能可达性”;较短的租期促使Peer更经常地续期,降低容错能力并且使用更多网络流量。
Google在它的Google Play Service中与服务器的心跳部分采取了自适应租期:随着连接上的时长增加,租期会逐渐变长。这种自适应租期的前提是,长期的“能连接上”可以预测接下来不太可能出现一段时间无法连接上的情况。自适应租期确实是个不错的方法,不过Rope中租期由Peer设置。Peer可以根据实际情况确定租期,目前这个数字还是固定值10秒。
PhysicalAddress
能被找到和能连接上是有区别的。当我们通过bind(2)、listen(2)和accept(2)监听一个端口时,其他人哪怕有我们的地址和端口号也不一定能连上。我们经常需要一些特殊的技巧才能在现实中连接上其它人的机器。比如,如果我们和目标机器之间有NAT的话,我们必须要穿透NAT才能连上。尽管它确实存在,但是我们确实不一定能连接上。
所以,Rope的PhysicalAddress里面的可达性被分成了两个维度:Existence和Reachability。Existence指的是这个PhysicalAddress是否存在,Reachability指示这个PhysicalAddress是否有可能连接上。
1 | const PhysicalAddress = struct { |
上面lastFound和lastDismiss就是用来标识Existence维度的值,lastReachable和promiseReachable用来标识Reachability维度。它们都是Unix时间戳。
Existence
lastFound和lastDismiss用于标识Existence维度,这两个值分别跟两个事件有关:_wire.found和_wire.down。前一个在发现新的PhysicalAddress后发送,后一个在发现PhysicalAddress所代表的路径断开之后发送。它们会通过EventPub发送到网络上的其它Peer。
_wire.found事件会更新lastFound到一个时间,_wire.down事件会更新lastDismiss。当lastFound大于lastDismiss时,我们认为这个PhysicalAddress还存在于网络上。
我们是否可以用一个值标识这个维度,比如说单一个lastFound?最开始我也是只设计了lastFound。问题在于,如果我们这样做,这个Existence会变成一个租期风格的维度。但是这个事情明明我们已知,使用租期会出现“可能”。
或者我们可以使用一个布尔值来代替这两个值,但是这样时间信息就会丢失。丢失时间信息会让程序在这两个事件频繁发生时变得混乱,特别是当发送该事件到接受该事件存在时间差时(EventPub使用泛洪法广播消息,在我们测量可达性的这个位置不保证事件能按照全局发送顺序收到)。考虑这个例子:两个Peer分别发送某个PhysicalAddress的found和down事件,found先发送但是最后收到,down后发送但是先收到。如果不分别保存两个时间我们只能简单地覆盖之前的结果,这时候状态就会变得奇怪。
Reachability
Reachability是一个完全独立的维度,它与Existence无关,跟这个PhysicalAddress是否连接上或是否正在传输数据有关。这是一个租期风格的维度。
理解”Reachable but not exists”
在Reachability里我强调这两个维度是独立的。这样看起来会存在一种奇特的情况:Reachable but not exists(可达但不存在)。
既然可达为何不存在呢?这里的不存在不是真的不存在,而是在网络上不存在。试试考虑下面的情景:目前网络上存在A和B,它们互相是认为对方Reachable and exists的。现在有一个新节点C要加入,他连接A并开始广播_ticktock事件让大家知道它的存在。在这时候A和C互相之间可达,但在A的视角看这个PhysicalAddress的lastFound仍然是初始值0,即这个PhysicalAddress还不存在(not exists)。现在A因为发现了新的PhysicalAddress就会广播一条_wire.found事件。然后B、C收到这个事件后就会更新它们的lastFound,然后分别将该消息转发给A、C和A、B。这时A就会收到它自己发出的这条消息,虽然这条消息不会被转发给别的Peer或应用,但是A仍然会用这条消息更新lastFound。这时在A处这个PhysicalAddress就会变成Reachable and exists(可达并存在)。